Have you ever wished your Android phone or tablet could replace your entire computer? That’s now possible — you can install a Linux or Ubuntu desktop environment on virtually any modern Android device thanks to some clever workarounds. You don’t need to root your phone and you can even use a Bluetooth keyboard and mouse (and maybe an external display) for a powerful desktop-like experience. And even though the experience doesn’t match a real Linux computer, it’s more than usable in a pinch and worth trying out.
QUICK ANSWER
To install a Linux environment on your Android device, you can use the Debian NoRoot or UserLAnd apps. If you choose the latter, you’ll also get to choose between various distributions like Kali Linux, Arch, and Ubuntu. While neither app installs a full operating system, they do offer a complete desktop environment and the ability to run many popular Linux programs.
JUMP TO KEY SECTIONS
Debian NoRoot: One-click Linux desktop
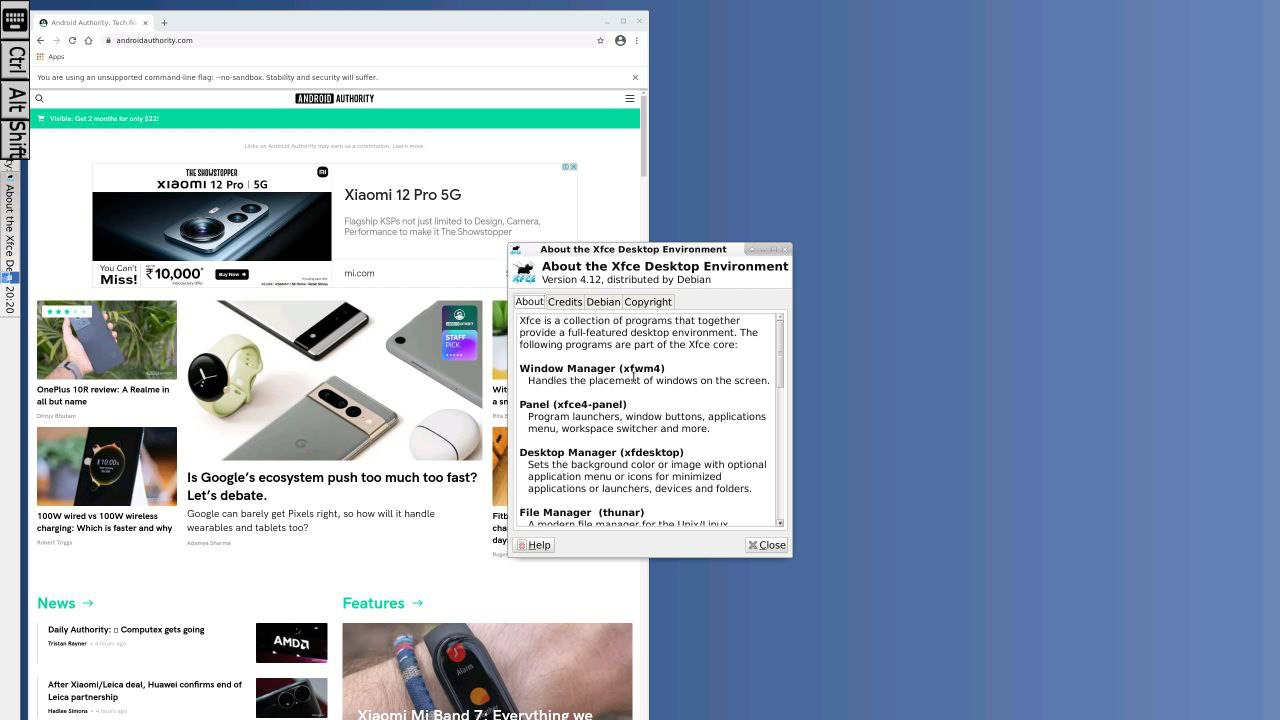
Calvin Wankhede / Android Authority
Debian NoRoot offers one of the easiest and least complicated ways to access a Linux desktop on Android. It’s a free app that you need to install via the Play Store. If you haven’t heard of Debian, it’s the flavor of Linux that the popular Ubuntu distribution is based upon. This guarantees compatibility with a wide range of Linux apps and the apt package manager.
Debian NoRoot is pretty lightweight and should run on most Android smartphones and tablets. It’s not the complete Debian operating system — instead, its developer describes it as a “compatibility layer, which allows you to run Debian applications.” How is this possible? Well, Android runs a modified Linux kernel, making it somewhat related to our end-goal. Debian NoRoot also includes all of the basics, including a desktop environment and a terminal application. All in all, it’s a perfect starting point for experienced and novice users alike.
Debian NoRoot lets you access a full-fledged Linux desktop with a simple download from the Play Store.
Once you’ve installed the Debian NoRoot app on your Android device and open it for the first time, it will present you with a list of display resolutions and font scales. Select the default options here, and it will eventually bring you to the desktop.
From this point on, you can immediately get to installing additional Linux programs and apps. We’ll explain how you can do this via the terminal in a later section. For now, consider plugging in a keyboard and mouse since the on-screen touch keyboard can take up a big chunk of your screen’s real estate.
Related: What is a kernel and why does it matter on Android and Linux?



