Some modest hardware projects that I have implemented and stored at home in a drawer….
Gorlov helical wind turbine
The Gorlov helical turbine (GHT) is a water turbine evolved from the Darrieus turbine design by altering it to have helical blades/foils. The physical principles of the GHT work[3] are the same as for its main prototype, the Darrieus turbine, and for the family of similar vertical axis wind turbines which includes also Turby wind turbine, aerotecture turbine, Quietrevolution wind turbine, etc. GHT, Turby and Quietrevolution solved pulsatory torque issues by using the helical twist of the blades.

The resulting work, all mechanically printed completely on a 3D printer. A DC motor with a permanent magnet serves as a generator. The motor voltage at the output is 1.6V / 1 rpm.
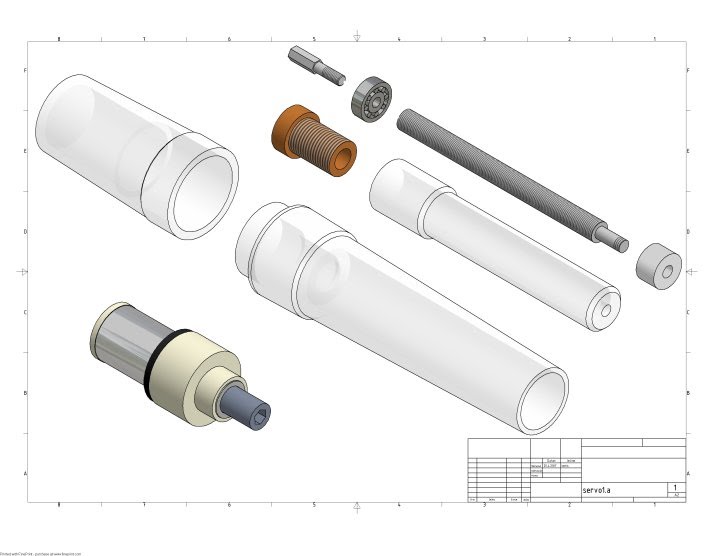
The actuator
actuator an electromechanical drive designed in AutoCAD Inventor, is made of nylon. 61: 1 planetary gearbox with electric screwdriver. Torque is routed through a rolled brass nut onto a smoothly rolled spiral that transfers the torque at the output of the drive. The torque is 800 Nm, the stroke is 122 mm. The power supply is 12 WA. Drive control is a microcontroller and an integrated powerline or a switch. It is used as a lifting and routing device in robotics.

ServoControler
Designed and built to drive three drives for 60W load, Feedback is through an optical incremental counter. The board uses the ATmega16 processor and the controller of three power H-mos amplifiers. The board is programmable through the ISP interface. Use them for servo motor control and robotic positioning.
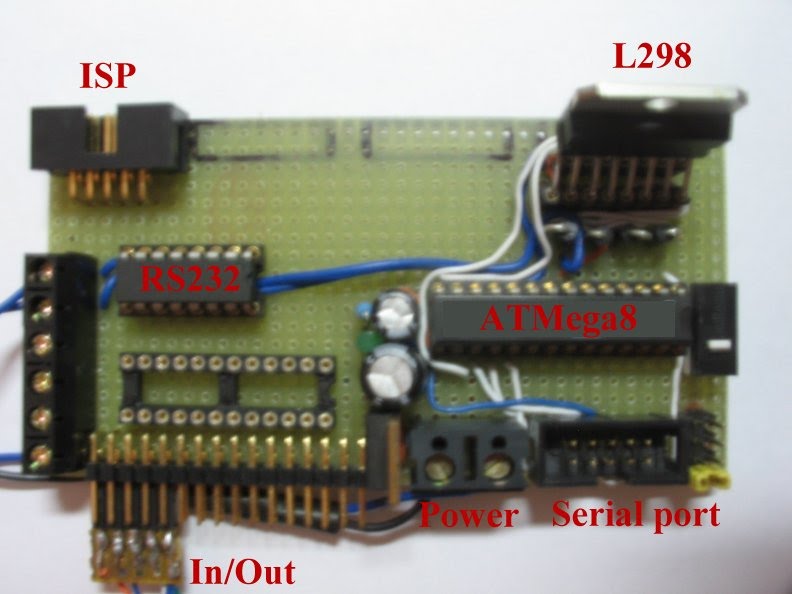
Square Signal Generator
SSG is built on the ATmega8 chip with an adjustable frequency of 0.25 to 8 MHz in 1024 steps. Adjustable pulse width from 0.01% to 100.00% with 1024 steps. Independent pulse width and frequency setting. The optional display shows: frequency, time, pulse width, firmware info, …
