Current AI training methods burn colossal amounts of energy to learn, but the human brain sips just 20 W. Swiss startup FinalSpark is now selling access to cyborg biocomputers, running up to four living human brain organoids wired into silicon chips.
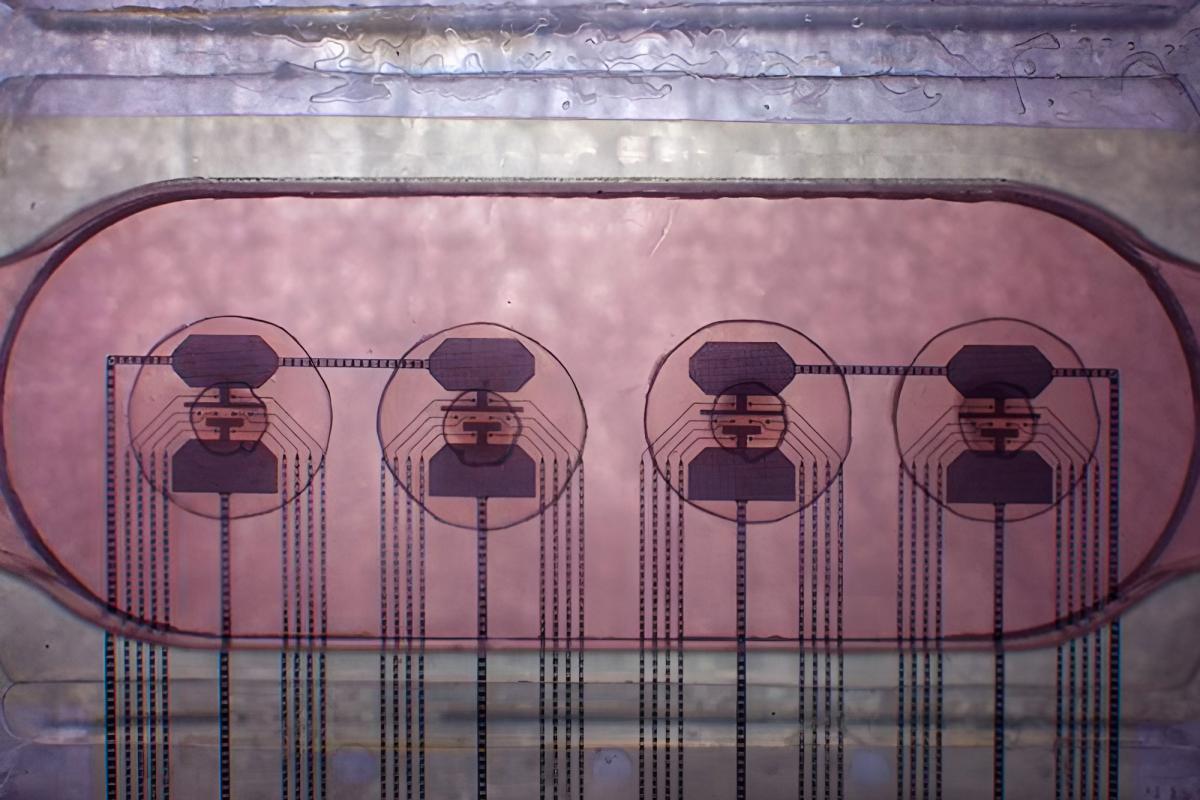
Four human brain organoids, each with around 10,000 living human brain cells, wired into a biocomputing array
The human brain communicates within itself and with the rest of the body mainly through electrical signals; sights, sounds and sensations are all converted into electrical pulses before our brains can perceive them. This makes brain tissue highly compatible with silicon chips, at least for as long as you can keep it alive.
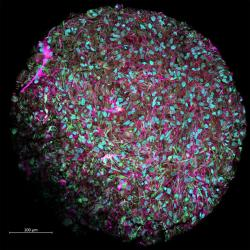
For FinalSpark’s Neuroplatform, brain organoids comprising about 10,000 living neurons are grown from stem cells. These little balls, about 0.5 mm (0.02 in) in diameter, are kept in incubators at around body temperature, supplied with water and nutrients and protected from bacterial or viral contamination, and they’re wired into an electrical circuit with a series of tiny electrodes.

These two-way electrodes can send pulses of electricity into the brain organoids, and they can also measure the responses coming out of them. And that’s really all you need to start taking advantage of nature’s greatest computing machines; neurons habitually search for patterns, seeking order and predictability … <continue>
https://newatlas.com/computers/finalspark-bio-computers-brain-organoids/